
長らくお待たせしました。久々の投稿です。諸般の事情で更新できずにおりましたが、今後の方向性が固まってきたこともあって折に触れあまり欲張らず気張らず、投稿を再開しようと思います。
Raspberry Piを立ち上げる(2020.8.3)
Raspberry Piの立ち上げ方が変わっているので現時点(2020.8.3)での方法を書き留めておきます。
- 下記サイトをアクセスします
(2) 自分のPCに合ったリンクをクリックします(以下はmacOSを例に挙げます)
(3) ダウンロードできたRaspberry Pi Imager.appを立ち上げる
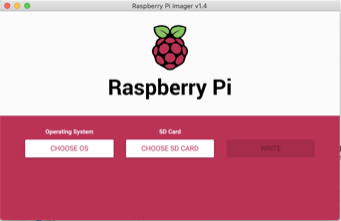
(4) CHOOSE OSでRaspberry Pi OS(32-bit)を、CHOOSE SD CARDでPCに挿したSD Cardをそれぞれ選択してWRITEを実行してしばらく待つ
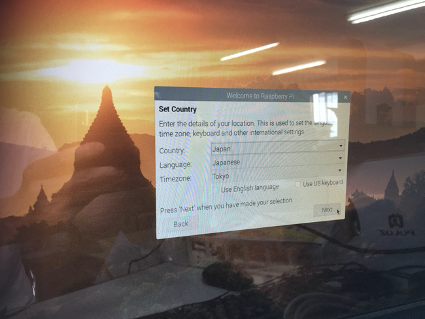
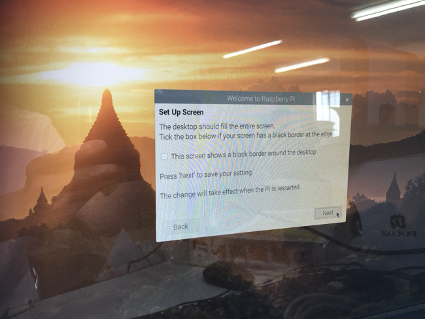
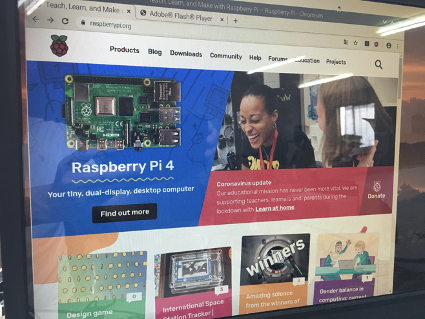
(5) できたSD CardをRaspberry Piに挿して電源を入れるとOSが立ち上がる

Country/Language/Timezoneを入力する
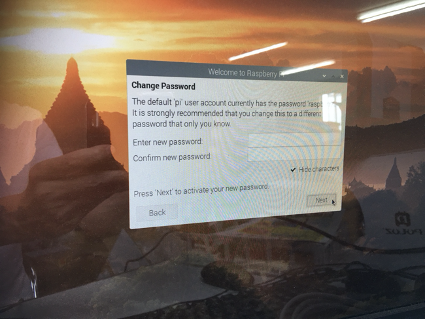
Passwordを変える(デフォルトはPiになっている)
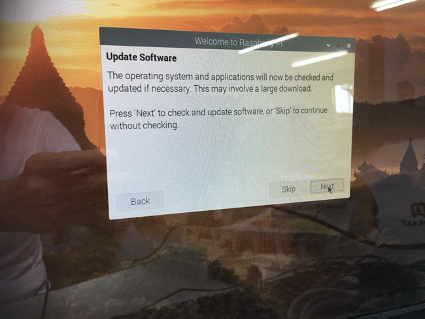
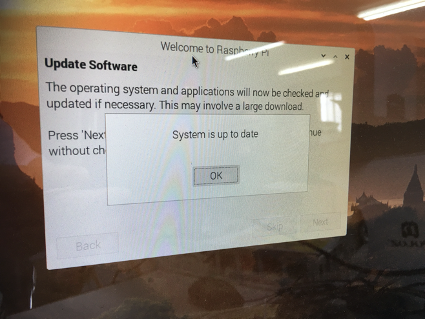
Updateが終わると次の画面が出て初期インストールは終了です。
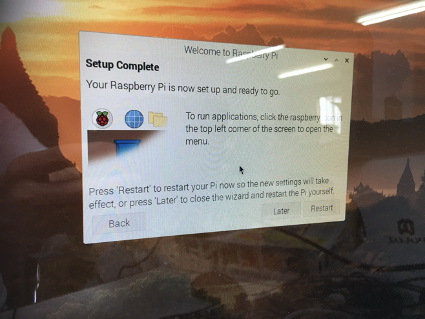
リスタートしてWeb browserを立ち上げると無事ラズパイ財団のページが表示されました。
ここまで
STM250JとEMCSJの違い
EnOcean規格の新型ドアセンサーEMCSJが販売開始になりました。旧型製品のSTM250Jとの違いは
・バックアップ用コイン電池CR1225が内蔵できる
STM250Jは、当社が電池内蔵可能に改良したSTM250J-Bがありましたが(内蔵電池はCR1220)、本製品はこれの置き換えになります。
・取り付け用ブラケットと本体が簡単に脱着できる
取り付け用ブラケットを先に壁や扉に貼り付けた後に本体を装着するなど設置が容易になりました。
あと、マグネットがスティック型から面積の広いシート型になりました。
EnOcean新型ドアセンサーEMCSJが入荷しました
EnOceanドアセンサーが新しくなります
新型のEnOceanドアセンサーの型名はEMCSJ。近日入荷します。ご期待ください。
「塩尻ムセン」をよろしく
これから更新頻度は「塩尻ムセン」の方が多くなります。よろしくお願いします。
新規サイトの立ち上げ手順(2)
(1)ではデモサイトをインポートして色々弄ってから自分のサイトの設計を始めた方が良い、と言う話を書きました。
もう一つ、言っておきたいのは、変更した設定や書き溜めたファイルのバックアップ、リストアの仕方を実際に確認しておくと良い、と言うことです。
まとめると、新規サイトを立ち上げる際の大まかな手順は
(1) デモサイトをよく観察し、できればスタイル、テーマを取り込んで自分で弄ってみる
(2) ファイルのバックアップ、リストアの仕方を実際に試して確認しておく
(3) デザインの大枠(WordPressでは「テーマ」と称する)は後になってから大きくは変えられないので、内容をたくさん書き始める前にイメージを固めて全体の設計をしておくと良い
くらいですかね。
ここまで
新規サイトの立ち上げ手順(1)
ここではTHE THORを使った場合の手順を残します。
コンテンツを書き溜めた後でデザインを後から変えるのは大変なので、最初にサイトの大まかなデザインを決める必要があります。
THE THORには参考になるデモサイトが用意されているので、自分が作りたいサイトはどれに近いのか、選んでおくと良いと思います。
私の場合は、”02″を選びました。
次に、自分のサイトを作り始める前に、イメージの近いデモサイトを実際のWordPressに読み込ませて、エディターの使い方に習熟した方が良いと思います。どこをどう触るとこのようになるのか、のあたりをつけておく、ということです。
最初にこれをやらずにサラの状態からマニュアルの最初から読みながら作り始めて失敗しました。せっかくお手本があるのだからこれをいじりながら感覚を養った方が近道だと思います。
ここまで
これから生きる姿勢を変えようと思います
大げさなタイトルにしましたが、今まで何かを残そうと奮闘してきたのを、今この瞬間を大事に全力で生きる。後に何が残るかは気にしない。という考えに改めようと心を入れ替えた、ということです。
その意図は、何かを残そうとやりたいことを我慢して頑張ったところで何も残らない可能性もあり、死ぬ間際にやりたかったことができなかった後悔をしそうな気がしたからです。
何かが残れば御の字だが、何も残らなくても自分の中では生き切った満足感が残るのではないか?と思います。
THE THOR(ザ・トール)をインストールする
しばらくは無償のテーマでやろうと思ったのですが、後から変更するとデザインが崩れたり変更が大変そうなので、最初から評判の良いテーマを購入することにして選んだのがTHE THORです。まだ導入したばかりで良いも悪いも言えませんので宣伝もしません。ただ使えるようになるまで淡々と記事にして行こうとは思っています。
購入先はググれば出てくるので詳しくは書きませんが、誰から買っても最終的にはInfotopと言うコンテンツの販売サイトからダウンロードするようになっているようです。
最初にトラブったのが、ダウンロードしてきたファイルがzipだったのでこのままWordPressのテーマにインストールできると勘違いしたこと。結局このファイルはダウンロード用で、zipを解凍したら2つのzipファイルが出てきました。これを外観>テーマから親>子の順にアップロードし、子の方を有効化します。←これも間違いやすいので気をつけましょう。
